Altimeter Testing at Airfest
Bdale and I, along with AJ Towns and Mike Beattie, spent last weekend in Argonia, Kansas, flying rockets with our Kloudbusters friends at Airfest 19. We had a great time! AJ and Mike both arrived a week early at Bdale's to build L3 project airframes, and both flew successful cert flights at Airfest!
Airfest was an opportunity for us to test fly prototypes of new flight electronics Bdale and I have spent the last few weeks developing, and I thought I'd take a few minutes today to write some notes about what we built and flew.
TeleMega
We've been working on TeleMega for quite a while. It's a huge step up in complexity from our original TeleMetrum, as it has a raft of external sensors and six pyro circuits.
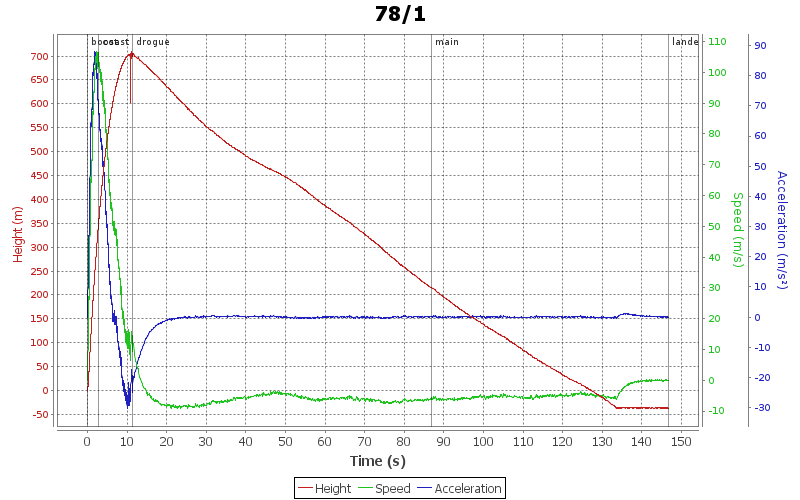
Bdale flew TeleMega in his new fiberglass 4" airframe on a Loki 75mm blue M demo motor. GPS tracking was excellent; you can see here that GPS altitude tracked the barometric sensor timing exactly:
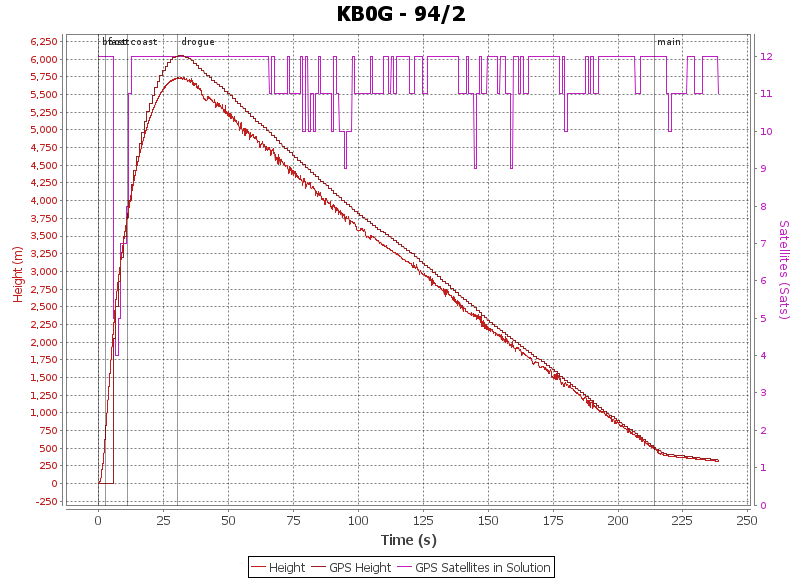
GPS lost lock when the motor lit, but about 3 seconds after motor burnout, it re-acquired the satellite signals and was reporting usable altitude data right away.
The GPS reported altitude was higher than the baro sensor, but that can be explained by our approximation of an atmospheric model used to convert pressure into altitude.
The rest of the flight was also nominal; TeleMega deployed drogue and main chutes just fine.
TeleMetrum
We've redesigned TeleMetrum. The new version uses better sensors (MS5607 baro sensor, MMA6555 accelerometer) and a higher power radio (CC1120 40mW). The board is the same size, all the connectors are in the same places so it's a drop-in replacement, and it's still got two pyro channels and USB for configuration, data download and battery charging.
I loaded up my Candy-Cane airframe with a small 5 grain 38mm CTI classic:
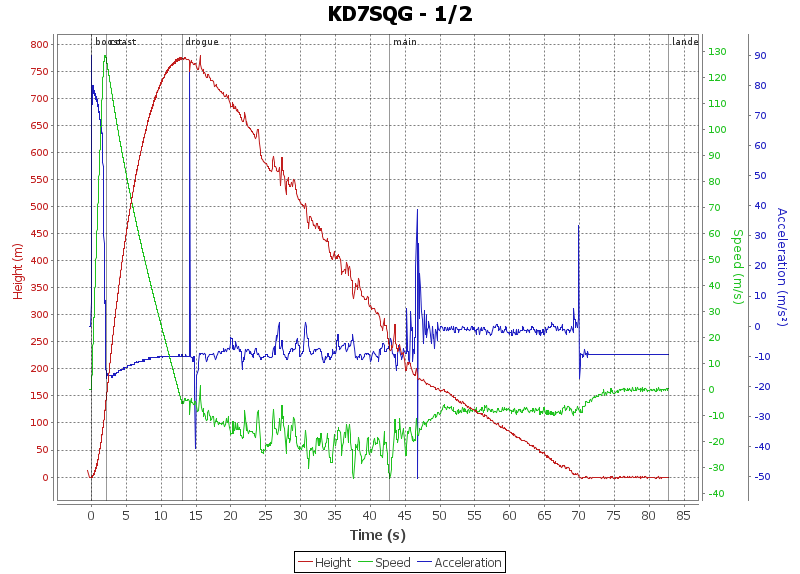
The flight computer worked perfectly, but GPS reception was not as good as we'd like to see:
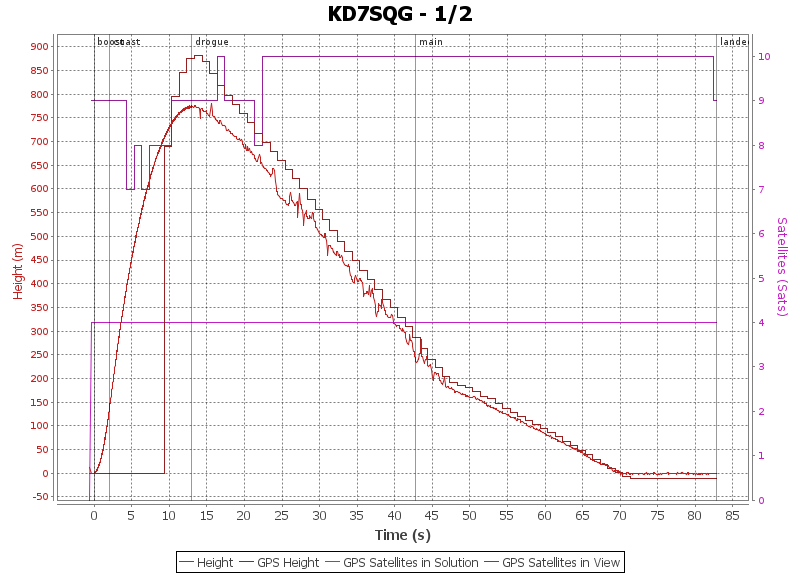
Given how well TeleMega was receiving GPS signals, I'm hopeful that we'll be able to tweak TeleMetrum to improve performance.
TeleMini
We've also redesigned TeleMini. It's still a two-channel flight computer with logging and telemetry, but we've replaced the baro sensor with the MS5607, added on-board flash for increased logging space and added on-board screw terminals for an external battery and power switch. You can still use one of our 3.7V batteries, but you can also use another battery providing from 3.7 to 15V.
I was hoping to finish up the firmware and fly it, but I ran out of time before the launch. The good news is that all of the components of the board have been tested and work correctly, and the firmware is 'feature complete', meaning we've gotten all of the features coded, it's just not quite working yet.
EasyMini
EasyMini is a new product for us. It's essentially the same as a TeleMini, but without a radio. Two channels, baro-only, with logging. Like TeleMini, it includes an on-board USB connector and can use either one of our 3.7V batteries, or an external battery from 3.7V to 15V. EasyMini and TeleMini are the same size, and have holes in the same places, so you can swap between them easily.
I flew EasyMini in my Koala airframe with a 29mm 3 grain CTI blue-streak motor. EasyMini successfully deployed the main chute and logged flight data:
We also sent a couple of boards home with Kevin Trojanowski and Greg Rothman for them to play with.
TeleGPS
TeleGPS is a GPS tracker, incorporating a u-blox Max receiver and a 70cm transmitter. It can send position information via APRS or our usual digital telemetry formats.
I was also hoping to have the TeleGPS firmware working, and I spent a couple of nights in the motel coding, but didn't manage to finish up. So, no data from this board either.
Production Plans
Given the success of the latest TeleMega prototype, we're hoping to have it into production first. We'll do some more RF testing on the bench with the boards to make sure it meets our standards before sending it out for the first production run. The goal is to have TeleMega ready to sell by the end of October.
TeleMetrum clearly needs work on the layout to improve GPS RF performance. With the testing equipment that Bdale is in the midst of re-acquiring, it should be possible to finish this up fairly soon. However, the flight firmware looks great, so we're hoping to get these done in time to sell by the end of November.
TeleMini is looking great from a hardware perspective, but the firmware needs work. Once the firmware is running, we'll need to make enough test flights to shake out any remaining issues before moving forward with it.
EasyMini is also looking finished; I've got a stack of prototypes and will be getting people to fly them at my local launch in another couple of weeks. The plan here is to build a small batch by hand and get them into the store once we're finished testing, using those to gauge interest before we pay for a larger production run.