Decomposing Splines Without Recursion
To make graphics usable in Snek, I need to avoid using a lot of memory, especially on the stack as there's no stack overflow checking on most embedded systems. Today, I worked on how to draw splines with a reasonable number of line segments without requiring any intermediate storage. Here's the results from this work:
The Usual Method
The usual method I've used to convert a spline into a sequence of line segments is split the spline in half using DeCasteljau's algorithm recursively until the spline can be approximated by a straight line within a defined tolerance.
Here's an example from twin:
static void
_twin_spline_decompose (twin_path_t *path,
twin_spline_t *spline,
twin_dfixed_t tolerance_squared)
{
if (_twin_spline_error_squared (spline) <= tolerance_squared)
{
_twin_path_sdraw (path, spline->a.x, spline->a.y);
}
else
{
twin_spline_t s1, s2;
_de_casteljau (spline, &s1, &s2);
_twin_spline_decompose (path, &s1, tolerance_squared);
_twin_spline_decompose (path, &s2, tolerance_squared);
}
}
The _de_casteljau function splits the spline at the midpoint:
static void
_lerp_half (twin_spoint_t *a, twin_spoint_t *b, twin_spoint_t *result)
{
result->x = a->x + ((b->x - a->x) >> 1);
result->y = a->y + ((b->y - a->y) >> 1);
}
static void
_de_casteljau (twin_spline_t *spline, twin_spline_t *s1, twin_spline_t *s2)
{
twin_spoint_t ab, bc, cd;
twin_spoint_t abbc, bccd;
twin_spoint_t final;
_lerp_half (&spline->a, &spline->b, &ab);
_lerp_half (&spline->b, &spline->c, &bc);
_lerp_half (&spline->c, &spline->d, &cd);
_lerp_half (&ab, &bc, &abbc);
_lerp_half (&bc, &cd, &bccd);
_lerp_half (&abbc, &bccd, &final);
s1->a = spline->a;
s1->b = ab;
s1->c = abbc;
s1->d = final;
s2->a = final;
s2->b = bccd;
s2->c = cd;
s2->d = spline->d;
}
This is certainly straightforward, but suffers from an obvious flaw — there's unbounded recursion. With two splines in the stack frame, each containing eight coordinates, the stack will grow rapidly; 4 levels of recursion will consume more than 64 coordinates space. This can easily overflow the stack of a tiny machine.
De Casteljau Splits At Any Point
De Casteljau's algorithm is not limited to splitting splines at the midpoint. You can supply an arbitrary position t, 0 < t < 1, and you will end up with two splines which, drawn together, exactly match the original spline. I use 1/2 in the above version because it provides a reasonable guess as to how an arbitrary spline might be decomposed efficiently. You can use any value and the decomposition will still work, it will just change the recursion depth along various portions of the spline.
Iterative Left-most Spline Decomposition
What our binary decomposition does is to pick points t0 - tn such that splines t0..t1 through tn-1 .. tn are all 'flat'. It does this by recursively bisecting the spline, storing two intermediate splines on the stack at each level. If we look at just how the first, or 'left-most' spline is generated, that can be represented as an iterative process. At each step in the iteration, we split the spline in half:
S' = _de_casteljau(s, 1/2)
We can re-write this using the broader capabilities of the De Casteljau algorithm by splitting the original spline at decreasing points along it:
S[n] = _de_casteljau(s0, (1/2)ⁿ)
Now recall that the De Casteljau algorithm generates two splines, not just one. One describes the spline from 0..(1/2)ⁿ, the second the spline from (1/2)ⁿ..1. This gives us an iterative approach to generating a sequence of 'flat' splines for the whole original spline:
while S is not flat:
n = 1
do
Sleft, Sright = _decasteljau(S, (1/2)ⁿ)
n = n + 1
until Sleft is flat
result ← Sleft
S = Sright
result ← S
We've added an inner loop that wasn't needed in the original algorithm, and we're introducing some cumulative errors as we step around the spline, but we don't use any additional memory at all.
Final Code
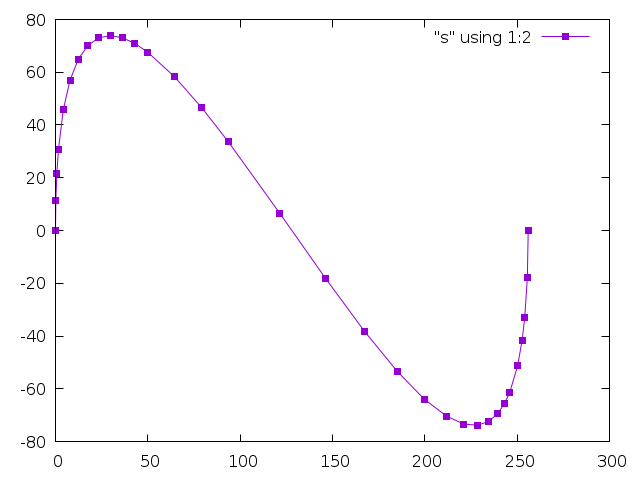
Here's the full implementation:
/*
* Copyright © 2020 Keith Packard <keithp@keithp.com>
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful, but
* WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
* General Public License for more details.
*
* You should have received a copy of the GNU General Public License along
* with this program; if not, write to the Free Software Foundation, Inc.,
* 51 Franklin St, Fifth Floor, Boston, MA 02110-1301, USA.
*/
#include <stdbool.h>
#include <stdio.h>
#include <string.h>
typedef float point_t[2];
typedef point_t spline_t[4];
#define SNEK_DRAW_TOLERANCE 0.5f
/* Is this spline flat within the defined tolerance */
static bool
_is_flat(spline_t spline)
{
/*
* This computes the maximum deviation of the spline from a
* straight line between the end points.
*
* From https://hcklbrrfnn.files.wordpress.com/2012/08/bez.pdf
*/
float ux = 3.0f * spline[1][0] - 2.0f * spline[0][0] - spline[3][0];
float uy = 3.0f * spline[1][1] - 2.0f * spline[0][1] - spline[3][1];
float vx = 3.0f * spline[2][0] - 2.0f * spline[3][0] - spline[0][0];
float vy = 3.0f * spline[2][1] - 2.0f * spline[3][1] - spline[0][1];
ux *= ux;
uy *= uy;
vx *= vx;
vy *= vy;
if (ux < vx)
ux = vx;
if (uy < vy)
uy = vy;
return (ux + uy <= 16.0f * SNEK_DRAW_TOLERANCE * SNEK_DRAW_TOLERANCE);
}
static void
_lerp (point_t a, point_t b, point_t r, float t)
{
int i;
for (i = 0; i < 2; i++)
r[i] = a[i]*(1.0f - t) + b[i]*t;
}
static void
_de_casteljau(spline_t s, spline_t s1, spline_t s2, float t)
{
point_t first[3];
point_t second[2];
int i;
for (i = 0; i < 3; i++)
_lerp(s[i], s[i+1], first[i], t);
for (i = 0; i < 2; i++)
_lerp(first[i], first[i+1], second[i], t);
_lerp(second[0], second[1], s1[3], t);
for (i = 0; i < 2; i++) {
s1[0][i] = s[0][i];
s1[1][i] = first[0][i];
s1[2][i] = second[0][i];
s2[0][i] = s1[3][i];
s2[1][i] = second[1][i];
s2[2][i] = first[2][i];
s2[3][i] = s[3][i];
}
}
static void
_spline_decompose(void (*draw)(float x, float y), spline_t s)
{
float t;
spline_t s1, s2;
(*draw)(s[0][0], s[0][1]);
/* If s is flat, we're done */
while (!_is_flat(s)) {
t = 1.0f;
/* Iterate until s1 is flat */
do {
t = t/2.0f;
_de_casteljau(s, s1, s2, t);
} while (!_is_flat(s1));
/* Draw to the end of s1 */
(*draw)(s1[3][0], s1[3][1]);
/* Replace s with s2 */
memcpy(&s[0], &s2[0], sizeof (spline_t));
}
(*draw)(s[3][0], s[3][1]);
}
void draw(float x, float y)
{
printf("%8g, %8g\n", x, y);
}
int main(int argc, char **argv)
{
spline_t spline = {
{ 0.0f, 0.0f },
{ 0.0f, 256.0f },
{ 256.0f, -256.0f },
{ 256.0f, 0.0f }
};
_spline_decompose(draw, spline);
return 0;
}