CrickitSnek — snek on the Adafruit Crickit
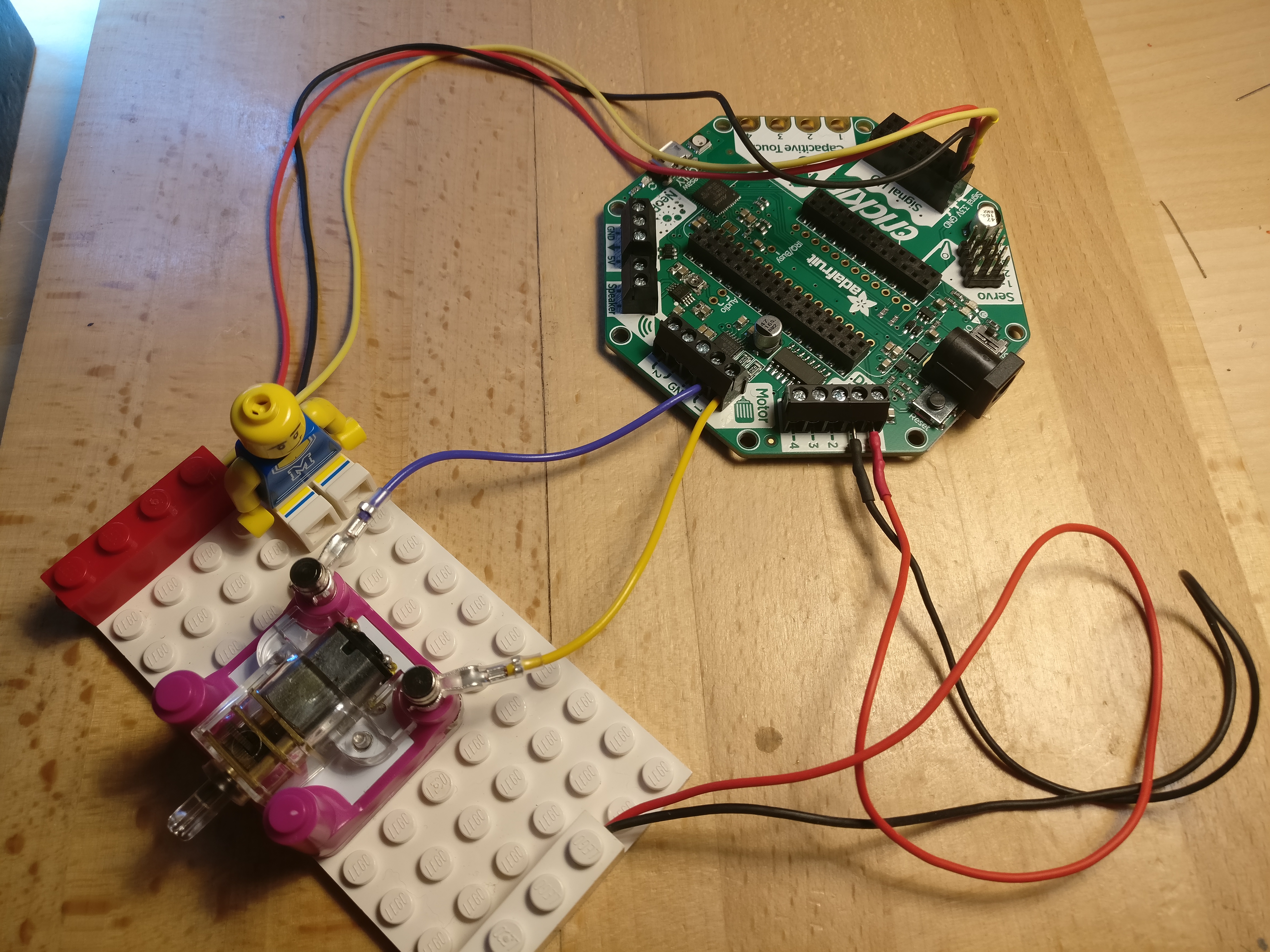
I got a Crickit FeatherWing from Adafruit today. This board is supposed to act as an I/O expander for all of the Feather boards, but it's a completely operational SAMD21 machine with a pile of useful GPIO bits:
- 4 “Capacitive Touch” pins (which are just regular GPIOs)
- 8 Analog input/digital output pins
- 4 Digital I/O pins
- 4 High-current 5V digital output pins
- 2 H-bridge motor controllers
- 1 Audio amplifier
- 1 high current output designed for NeoPixels
It's also got a USB port and an on-board NeoPixel, plus headers to plug in a Feather board.
There's no Crystal on the Crickit
To save cost, the Crickit design doesn't include any crystal at all. That required re-configuring the SAMD21 clock configuration to synchronize the 48MHz system clock from USB instead of from the 32.768kHz crystal present on the Metro and Feather boards. Once I had done this, the Crickit board appeared on USB and Snek was running.
Naming the Crickit pins
There are a bunch of separate I/O groupings on the Crickit board, and I wanted to make it easy to remember how to use them. Providing convenient names for each pin seemed like the the best plan.
On the Metro and Duemilanove boards, I just used numbers for all of the pins; 0-13 for the digital pins and 14-19 for the analog pins. This matches the Arduino conventions, although it doesn't provide the convenient 0-5 numbering for analog input. Having names for these pins will also be nice.
So, I hacked up the Snek 'builtins' mechanism to include builtins with numeric values. Now you can have as many builtin values as you want. I first replaced the wacky lexer hacks for values like 'math.pi', 'True' and 'False' and then went and added names for the pins on all devices.
Snek vs TI DRV8833
The TI DRV8833 motor controller chip on the Crickit has two pins per motor -- you set one pin to ground and drive the other with a PWM signal, which pin you PWM selects the direction of the motor. This doesn't directly map to how I expected motor controllers to work in Snek. Snek expects to have one pin control direction and the other control speed.
I had to do a bit of magic to make this work, but the joy of having an interpreter between the application and the hardware is having the ability to hide these kinds of details from the application
Minor Crickit Schematics Error
The Crickit Schematics linked from the Crickit Downloads page have the DRIVE labels flipped -- DRIVEIN1 is actually hooked to PB10, DRIVEIN2 to PB11, DRIVEIN3 to PA12 and DRIVEIN4 to PA13. The Eagle schematics on github are correct; it would be nice to have the images updated as those don't require downloading proprietary software to view.
Status
All of these bits are in the Snek git repository and should be released in the next Snek version (0.97?).