AltOS 0.8 — New Software and Firmware for Altus Metrum Devices
Bdale and I are pleased to announce the release of AltOS version 0.8.
AltOS is the core of the software for all of the Altus Metrum products. It consists of cc1111-based microcontroller firmware and Java-based ground station software.
AltosUI — New Features in the AltusMetrum Ground Station

AltOS version 0.8 contains significant upgrades to the ground station software, AltosUI:
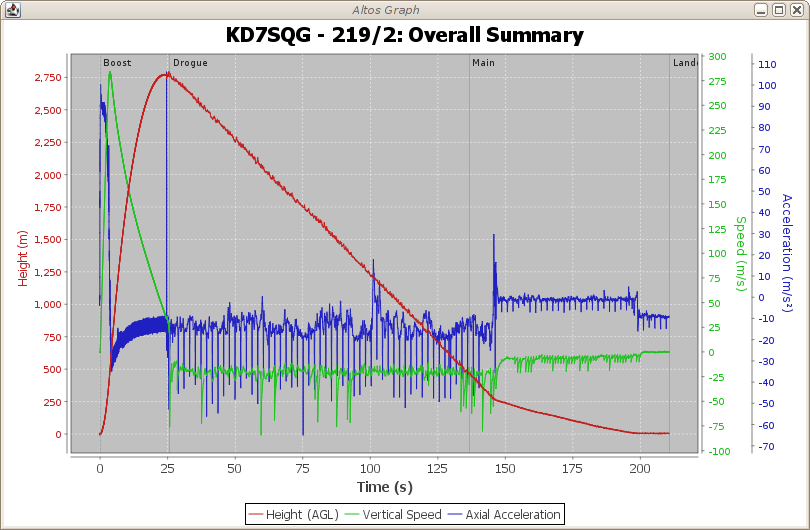
- Post-flight graphing tool. This lets you explore the behaviour of your rocket after flight with a scroll-able and zoom-able chart showing the altitude, speed and acceleration of the airframe along with events recorded by the flight computer. You can export graphs to PNG files, or print them directly.
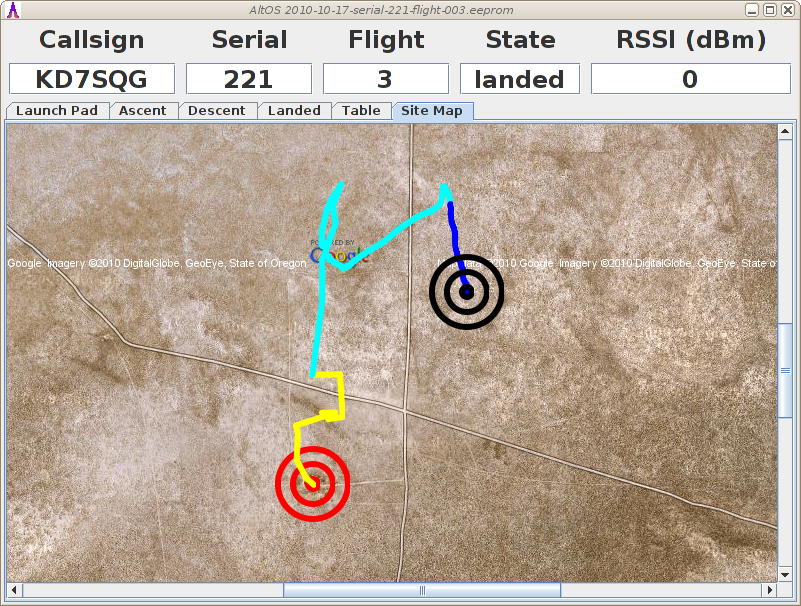
- Real-time moving map which overlays the in-progress flight on satellite imagery fetched from Google Maps. This lets you see in pictures where your rocket has landed, allowing you to plan recovery activities more accurately.
Wireless recovery system testing. Prep your rocket for flight and test fire the deployment charges to make sure things work as expected. All without threading wires through holes in your airframe.
Optimized flight status displays. Each flight state now has it's own custom 'tab' in the flight monitoring window so you can focus on the most important details. Pre-flight, the system shows a set of red/green status indicators for battery voltage, apogee/main igniter continutity and GPS reception. Wait until they're all green and your rocket is ready for flight. There are also tabs for ascent, descent and landing along with the original tabular view of the data.
Monitor multiple flights simultaneously. If you have more than one TeleDongle, you can monitor a flight with each one on the same computer.
Automatic flight monitoring at startup. Plug TeleDongle into the machine before starting AltosUI and it will automatically connect to it and prepare to monitor a flight.
Exports Google Earth flight tracks. Using the Keyhole Markup Language (.kml) file format, this provides a 3D view of your rocket flight through the Google Earth program.
Continuing Features
AltOS version 0.8 continues to provide the following features:
Receive and log telemetry from a connected TeleDongle device. All data received is saved to log files named with the current date and the connected rocket serial and flight numbers. There is no mode in which telemetry data will not be saved.
Download logged data from TeleMetrum devices, either through a direct USB connection or over the air through a TeleDongle device.
Configure a TeleMetrum device, setting the radio channel, callsign, apogee delay and main deploy height. This can be done through either a USB connection or over a radio link via a TeleDongle device.
Replay a flight in real-time. This takes a saved telemetry log or eeprom download and replays it through the user interface so you can relive your favorite rocket flights.
Reprogram Altus Metrum devices. Using an Altus Metrum device connected via USB, another Altus Metrum device can be reprogrammed using the supplied programming cable between the two devices.
Export Flight data to a comma-separated-values file. This takes either telemetry or on-board flight data and generates data suitable for use in external applications. All data is exported using standard units so that no device-specific knowledge is needed to handle the data.
Speak to you during the flight. Instead of spending the flight hunched over your laptop looking at the screen, enjoy the view while the computer tells you what's going on up there. During ascent, you hear the current flight state and altitude information. During descent, you get azimuth, elevation and range information to try and help you find your rocket in the air. Once on the ground, the direction and distance are reported.
AltOS Firmware Update
AltOS version 0.8 contains a minor firmware update for TeleMetrum to resolve an issue with main deployment. A mis-feature in the igniter firing code would delay main deployment by 2 seconds in some cases.
Thanks to our contributors!
We had a lot of help with this release:
Anthony Towns wrote both the new data graphing interface and the moving map display.
Bob Finch helped clean up our documentation, and provided flight testing for the firmware updates.
Future Plans
A number of features are implemented or in process in the sources available in our publicly visible repository that are not part of the current stable release.
A Kalman-filter based approach to apogee detection using more than just the baro sensor, so that we can safely control apogee ejection on flights to altitudes beyond the range of our baro sensor alone. Unlike the other items on the list, this will be a significant change to the in-rocket TeleMetrum firmware. It may therefore be a while before this becomes part of a stable firmware release.
Motor characterization. Because TeleMetrum contains a high-resolution, high-frequency accelerometer, it is possible to take the data from that and compute an accurate thrust curve for the motor.
Comprehensive PDF and/or HTML -based flight report. Construct a complete report of the flight suitable for publication on the web that includes graphs of the flight and details about motor performance etc.
Publish flight data to the Altus Metrum web site. This will allow you to share your flight data with others, and let you download flights published by others.
There are any number of additions that could be made to this list; feel free to send along ideas that you’ve got. Of course, all of this software is licensed under the GNU General Public License, so you can get the source and hack on it in the comfort of your own home.